 |
| 8085 Architecture |
Control Unit
Generates signals within uP to carry out the instruction, which has been decoded. In reality causes certain connections between blocks of the uP to be opened or closed, so that data goes where it is required, and so that ALU operations occur.
Arithmetic Logic Unit
The ALU performs the actual numerical and logic operation such as ‘add’, ‘subtract’, ‘AND’, ‘OR’, etc. Uses data from memory and from Accumulator to perform arithmetic. Always stores result of operation in Accumulator.
Registers The 8085/8080A-programming model includes six registers, one accumulator, and one flag register, as shown in Figure. In addition, it has two 16-bit registers: the stack pointer and the program counter. They are described briefly as follows.
The 8085/8080A has six general-purpose registers to store 8-bit data; these are identified as B,C,D,E,H, and L as shown in the figure. They can be combined as register pairs - BC, DE, and HL - to perform some 16-bit operations. The programmer can use these registers to store or copy data into the registers by using data copy instructions.
Accumulator
The accumulator is an 8-bit register that is a part of arithmetic/logic unit (ALU). This register is used to store 8-bit data and to perform arithmetic and logical operations. The result of an operation is stored in the accumulator. The accumulator is also identified as register A.
Flags
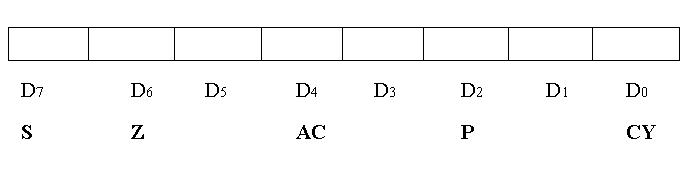
The ALU includes five flip-flops, which are set or reset after an operation according to data conditions of the result in the accumulator and other registers. They are called Zero(Z), Carry (CY), Sign (S), Parity (P), and Auxiliary Carry (AC) flags; they are listed in the Table and their bit positions in the flag register are shown in the Figure. The most commonly used flags are Zero, Carry, and Sign. The microprocessor uses these flags to test data conditions.
For example, after an addition of two numbers, if the sum in the accumulator is larger than eight bits, the flip-flop uses to indicate a carry -- called the Carry flag (CY) -- is set to one. When an arithmetic operation results in zero, the flip-flop called the Zero(Z) flag is set to one. The first Figure shows an 8-bit register, called the flag register, adjacent to the accumulator. However, it is not used as a register; five bit positions out of eight are used to store the outputs of the five flip-flops.
The flags are stored in the 8-bit register so that the programmer can examine these flags (data conditions) by accessing the register through an instruction.
These flags have critical importance in the decision-making process of the microprocessor. The conditions (set or reset) of the flags are tested through the software instructions. For example, the instruction JC (Jump on Carry) is implemented to change the sequence of a program when CY flag is set. The thorough understanding of flag is essential in writing assembly language programs.
Program Counter (PC)
This 16-bit register deals with sequencing the execution of instructions. This register is a memory pointer. Memory locations have 16-bit addresses, and that is why this is a 16-bit register.
The microprocessor uses this register to sequence the execution of the instructions. The function of the program counter is to point to the memory address from which the next byte is to be fetched. When a byte (machine code) is being fetched, the program counter is incremented by one to point to the next memory location
Stack Pointer (SP)
The stack pointer is also a 16-bit register used as a memory pointer. It points to a memory location in R/W memory, called the stack. The beginning of the stack is defined by loading 16-bit address in the stack pointer. The stack concept is explained in the chapter "Stack and Subroutines."
Instruction Register/Decoder
Temporary store for the current instruction of a program. Latest instruction sent here from memory prior to execution. Decoder then takes instruction and ‘decodes’ or interprets the instruction. Decoded instruction then passed to next stage.
Memory Address Register
Holds address, received from PC, of next program instruction. Feeds the address bus with addresses of location of the program under execution.
Control Generator Generates signals within uP to carry out the instruction which has been decoded. In reality causes certain connections between blocks of the uP to be opened or closed, so that data goes where it is required, and so that ALU operations occur.
Register Selector
This block controls the use of the register stack in the example. Just a logic circuit which switches between different registers in the set will receive instructions from Control Unit.
General Purpose Registers
uP requires extra registers for versatility. Can be used to store additional data during a program. More complex processors may have a variety of differently named registers.
Microprogramming
How does the μP knows what an instruction means, especially when it is only a
binary number? The microprogram in a uP/uC is written by the chip designer and tells the uP/uC the meaning of each instruction uP/uC can then carry out operation.
-----------
![[ ]](https://lh3.googleusercontent.com/blogger_img_proxy/AEn0k_uoek4EukkNeq-TXdKQ0N0ooeuIm-GgnmOAIBA6_Oyt6gRGC_l2OV4eS62oeXzuzeQ7o_EvE6oIxjVGs9SZ3V6EZPTEOcHoxTTFOI8ltXy3zQ=s0-d)
![[TXT]](https://lh3.googleusercontent.com/blogger_img_proxy/AEn0k_tiXDFOFYB2Lc4ORE3SrgsXppRXnic9lMsE24hEPeXSgifnnVBaF-BCtcK2WZ3oGb0nYKw6DKT3Dx97QuFd5-evusbLv5K97EeWmNJEZek=s0-d)





{kind=link}